您的当前位置:首页 > 新闻 > 智元机器人重磅开源GO 正文
时间:2025-10-20 03:52:49 来源:网络整理 编辑:新闻
9月23日,智元机器人正式宣布开源其通用具身基座大模型GO-1Genie Operator-1),该模型鉴于Vision-Language-Latent-ActionViLLA)架构打造,变成全球首个
9月23日,智元机器人正式宣布开源其通用具身基座大模型GO-1(Genie Operator-1),该模型鉴于Vision-Language-Latent-Action(ViLLA)架构打造,变成全球首个采用这一先进架构并免费向研发者开放的具身智能模型。此举有望大幅减少产业技术门槛,促进具身智能技术的普及与进展。
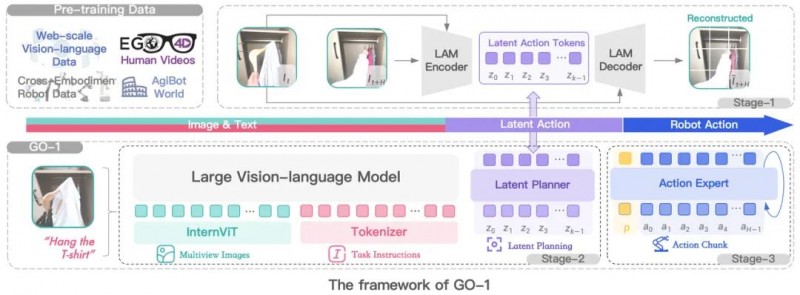
GO-1所采用的ViLLA架构在常规Vision-Language-Action(VLA)基本上引入隐式动作标记,有效弥合了图像-文本输入与机器人动作实施之间的语义差距。该架构包含三层协同机制:VLM多模态领会层鉴于InternVL-2B构建,支撑多视角视觉、力觉和语言消息的融合领会;Latent Planner经过预测隐式动作标记达成对复杂任务的高层规划;Action Expert则依托扩散模型生成高频率、高精度的持久动作序列,保证机器人实施的细腻控制。

为支撑研发者高效应用GO-1,智元机器人同步推出Genie Studio一站式研发系统,给予从数字采集、治理、训练与微调,到仿真评测和真机部署的全流程工具链。该系统集成Video Training方案和统一训练框架,支撑一键编译与部署,显著提升研发效率。
尽管GO-1鉴于AgiBot G1机器人数字开展预训练,但其在松灵机器人、方舟机器人、Franka机械臂等多种异构本体上均经过验证,体现出优秀的跨系统适应性。在Genie Sim和Libero等仿真环境中,GO-1也展现出领先的性能。经过集成通用LeRobot数字格式,该模型可支撑更多类型机器人的数字采集、微调与部署。
目前,GO-1模型代码与相干资产已在GitHub和Huggingface系统发布,研发者可免费获取并应用该模型,开启具身智能的应用探索与革新实践。
欧盟携手Epermarket推出“多彩欧洲美味,纵享万千搭配”欧盟秋冬寻味餐盒及零售推广2025-10-20 04:10
国际教育新路径 多元升学赢将来丨国贸枫禾泉州专场招生分享会圆满落幕2025-10-20 03:49
怎样挑选一款好的奶粉?金领冠珍护铂萃给出喂养最优解2025-10-20 03:47
名校之约|港科大2025内地招生:AI领航、跨界培养,打造全球革新人才摇篮2025-10-20 03:43
从辗转反侧到一夜安睡,TCL小蓝翼C7以AI睡眠守护都市白领睡眠质量2025-10-20 03:39
从“消息孤岛”到“数字共生”:朝晖过滤依托U9 cloud 构建国际角逐新壁垒!2025-10-20 03:00
吴晓波走进三翼鸟成都大店:揭秘逆风开店的“场景密码”2025-10-20 02:31
老庙携手天猫“超级首饰发布”,沉浸式演绎“好运文化”2025-10-20 02:26
“科技预言家”凯文·凯利参观我国策划智造大奖2025特展2025-10-20 02:01
铁轨如椽绘经纬,货箱成砖筑通途2025-10-20 01:30
欧盟携手Epermarket推出“多彩欧洲美味,纵享万千搭配”欧盟秋冬寻味餐盒及零售推广2025-10-20 03:52
BOE(京东方)“照亮成长路”公益工程新十年启幕 科技无界照亮美好将来2025-10-20 03:50
多举措强化材料治理 筑牢科研数字根基2025-10-20 03:34
微信、小红书等鸿蒙应用高频更新,华为Pura 80系列到手即解锁全新感受!2025-10-20 03:22
鹏鸿茶香板破圈,以技术迭代重构品牌向上基因2025-10-20 02:18
从饮食到穿搭 三星AI神系列冰洗产品带来618家电焕新好挑选2025-10-20 02:11
五年扛鼎之作攀登旗舰新高峰 DJI大疆全球发布产业级飞行系统 Matrice 4002025-10-20 01:53
太和板面:四季养生新感受,非遗美食焕新生2025-10-20 01:50
中免集团发布“中免花费白皮书” 勾勒我国旅游零售行当复苏全景2025-10-20 01:34
日威食品与白云山星群药业达成战略协作,启用太元龙品牌布局药食同源大健康食品新蓝海2025-10-20 01:30